아안뇨오엉하세요엉ㅇ
저번에 뮤텍스와 세마포어에 대해서 글을 적어봤는데요?
동기화기법은 신이고 무적같지만 사실 허점이 하나 있습니다.
바로 프로세스나 스레드간 교착 상태에 빠질 수 있다는 점인데요...
이 현상을 바로 데드락이라고 합니다!
데드락이 뭔지 같이 알아봅시당
데드락(Deadlock)이 뭘까?
데드락은 둘 이상의 프로세스나 스레드가 각각 서로 점유하고 있는 자원을 기다릴 때 무한 대기에 빠지는 상황을 일컫습니다.
아래 사진은 데드락이 생기는 과정을 사진으로 간단하게 나타낸 것입니다.

자원 A를 가진 스레드1이 있고,
자원 B를 가진 스레드2가 있을때,
스레드1: 야 B내놔ㅋ
스레드2: 싫어 A내놔ㅋ
이러고 있는거임ㅋㅋ
데드락이 생기는 조건?
데드락은 다음 네 가지 조건이 모두 만족될 때 발생합니다:
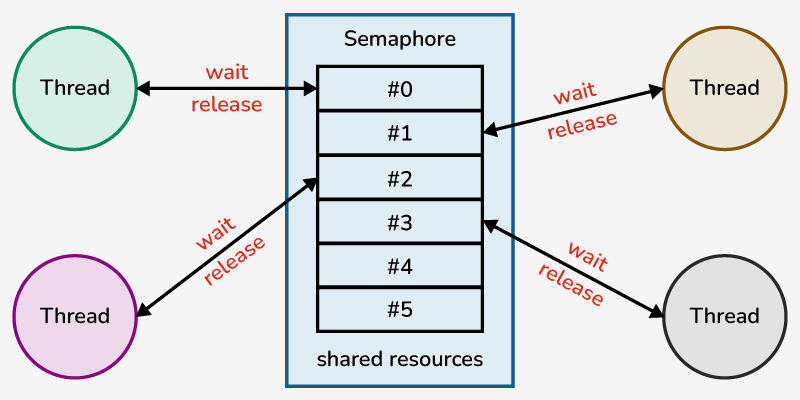
- 상호 배제(Mutual Exclusion):
- 자원은 동시에 하나의 프로세스만 사용할 수 있습니다.
- 점유와 대기(Hold and Wait):
- 프로세스는 자신이 이미 점유하고 있는 자원을 유지하면서, 추가로 다른 자원을 요청하며 대기합니다.
- 예: 스레드1은 자원 A를 점유한 상태에서 자원 B를 요청
- 비선점(No Preemption):
- 점유한 자원은 해당 프로세스가 작업을 완료하기 전까지 강제로 빼았지 못합니다.
- 예: 프로세스가 사용하는 자원은 작업 완료 전까지 다른 프로세스가 가져갈 수 없음.
- 순환 대기(Circular Wait):
- 프로세스들이 순환적으로 자원을 요청하며 서로 대기합니다.
- 예: A → B → C → A 순환 구조로 자원을 기다리는 상황.
세상에 이런 상황이 있다고?
놀랍게도 이런 상황이 나올 수 있고, 생각보다 간단하게 나옵니다.
아래는 데드락이 발생할 수 있는 예제코드입니다.
#include <iostream>
#include <thread>
#include <mutex>
std::mutex mutex1, mutex2;
void Worker1()
{
mutex1.lock();
std::this_thread::sleep_for(std::chrono::milliseconds(100)); // 다른 스레드가 실행될 여유를 줌
mutex2.lock();
mutex1.unlock();
mutex2.unlock();
}
void Worker2()
{
mutex2.lock();
std::this_thread::sleep_for(std::chrono::milliseconds(100)); // 다른 스레드가 실행될 여유를 줌
mutex1.lock();
mutex2.unlock();
mutex1.unlock();
}
int main() {
std::thread t1(Worker1);
std::thread t2(Worker2);
t1.join();
t2.join();
return 0;
}이렇게 되면 worker1은 mutex1을 통해 임계영역에 접근을 했지만, mutex2를 통해 또 다른 자원에 접근하고 싶지만, 이미 worker2가 mutex2를 통해 해당 자원을 점유한 상태입니다.
(따라서 초딩같이 싸우고 있다는거임ㅋㅋ)
데드락을 해결하려면?
데드락을 해결하려면 무슨 방법이 있을까요?
1) 예방(Prevention):
데드락 발생 조건 중 하나를 제거하여 문제를 사전에 방지.
- 상호 배제 제거: 자원을 공유 가능하게 설계 (단, 현실적으로 어려움).
- 점유와 대기 제거: 모든 자원을 한 번에 요청하도록 설계.
- 비선점 제거: 자원을 강제로 해제하거나 다른 프로세스로 넘김.
- 순환 대기 제거: 자원 요청 순서를 정해 순환 대기를 방지.
2) 회피(Avoidance):
자원 할당 시 데드락 발생 가능성을 분석해 안전한 상태(Safe State)만 유지.
- 은행원 알고리즘(Banker's Algorithm):
- 은행원이 고객에게 대출을 승인하기 전에 시스템 상태를 분석하는 방식에서 이름이 유래했습니다. 이를 프로세스와 자원 할당 문제에 대입하면 다음과 같은 원리로 작동합니다.
- 안전 상태(Safe State): 모든 프로세스가 작업을 완료하고 자원을 해제할 수 있는 상태입니다. 즉 모든 요청이 처리 가능한 상태.
- 불안전 상태(Unsafe State): 특정 자원 요청이 승인을 받으면 다른 프로세스가 자원을 기다리면서 데드락이 발생할 가능성이 있는 상태입니다.
- 은행원이 고객에게 대출을 승인하기 전에 시스템 상태를 분석하는 방식에서 이름이 유래했습니다. 이를 프로세스와 자원 할당 문제에 대입하면 다음과 같은 원리로 작동합니다.
3) 탐지(Detection):
데드락이 발생했는지 확인하고, 이를 해결하기 위한 전략을 사용하는 방법입니다. 탐지는 데드락을 허용한 상태에서 주기적으로 시스템의 자원 상태를 검사하여 데드락을 확인합니다. 탐지 후에는 데드락을 해결하기 위한 적절한 조치를 취합니다.
- 시스템 상태 검사
- 자원 할당 상태와 프로세스의 요청 상태를 바탕으로 Deadlock Detection Algorithm을 실행합니다. 데드락의 주요 조건인 사이클(Cycle) 또는 교착 상태(Wait-for Graph)를 탐지합니다.
- 입력 데이터를 통해 현재 상태를 보내줍니다.
- Available (가용 자원): 현재 시스템의 남아 있는 자원 수.
- Allocation (현재 할당): 각 프로세스에 이미 할당된 자원의 양.
- Request (현재 요청): 각 프로세스가 추가로 요청한 자원의 양.
4) 회복(Recovery):
데드락 탐지 이후 이미 발생한 데드락을 해결하는 과정입니다. 시스템이 데드락 상태임을 확인한 후, 프로세스를 종료하거나 자원을 회수하여 데드락을 해소하는 방법입니다.
- 데드락 회복 전략
- 프로세스 강제 종료(Termination) : 데드락 상태를 해소하기 위해 프로세스를 강제로 종료하여 자원을 해제하는 방법입니다.
- 자원 강제 회수 (Resource Preemption) : 데드락 상태를 해소하기 위해 프로세스를 강제로 종료하여 자원을 해제하는 방법입니다.
- 데드락에 얽히지 않은 프로세스 우선 실행 : 데드락 상태의 프로세스는 중단하거나 대기시키고, 데드락에 얽히지 않은 다른 프로세스부터 실행합니다.
데드락을 해결하는 방법을 알아봤지만, 결국엔 알고리즘과 상태검사로 인해 성능 오버헤드가 발생할 수 있습니다.
가장 좋은 방법은 데드락이 발생하지 않도록 예방하는 것이 중요하다고 생각합니다!
무엇이든 예방이 중요하다...
현대 OS는 데드락을 어떻게 처리할까?
현대의 운영체제, 즉 UNIX를 포함한 대부분의 OS는 일반적으로 데드락 탐지나 회복을 직접적으로 처리하지 않는 경우가 많습니다. 대신, OS는 데드락이 발생할 가능성을 낮추거나 개발자나 시스템 관리자가 이 문제를 처리하도록 설계하는 데 중점을 둡니다.
현대 OS가 데드락을 처리하지 않는 이유는?
(1) 성능 오버헤드
- 데드락을 탐지하거나 예방하는 알고리즘은 복잡한 연산을 포함하며, 이를 실시간으로 처리하려면 시스템 리소스에 큰 부하가 걸릴 수 있습니다.
- 특히 멀티스레드 환경이나 분산 시스템에서는 데드락 상태를 정확히 탐지하는 것이 어렵고, 탐지 비용이 높습니다.
(2) 일반화된 해결책 부족
- 데드락은 특정 상황에서 발생하므로, 모든 프로그램에 대해 범용적으로 작동하는 데드락 처리 방법을 제공하기 어렵습니다.
- 데드락을 해결하기 위한 프로세스 종료나 자원 회수는 애플리케이션의 상태를 망가뜨릴 수 있어, OS가 임의로 조치하는 것은 적절하지 않을 수 있습니다.
현대 OS는 데드락 처리를 시스템 수준에서 자동화하지 않고, 다음과 같은 방식을 통해 간접적으로 문제를 다룹니다:
- 개발자가 예방적 설계를 할 수 있도록 동기화 메커니즘과 도구 제공.
- 시스템 로그와 디버깅 툴로 데드락 원인 파악 지원.
- 사용자에게 프로세스 종료와 같은 수동적 해결책 제공.
운영체제는 성능과 안정성을 위해 데드락 관련 문제를 개발자의 책임으로 위임하는 방향으로 설계되었습니다.
따라서 우리 개발자는 데드락이 발생하지 않도록 신중히 코드를 짤 필요가 있습니다...ㅇㅅㅇ
'프로그래밍 > CS' 카테고리의 다른 글
| [CS] IPC(Inter Process Communication) (0) | 2024.12.02 |
|---|---|
| [CS] 페이지 교체 알고리즘 (0) | 2024.11.25 |
| [CS] 뮤텍스(Mutex)와 세마포어(Semaphore) (2) | 2024.11.19 |
| [CS] MMU, TLB (0) | 2024.11.04 |
| [CS] 세그멘테이션 (0) | 2024.11.04 |